The future of transportation is being revolutionized by concepts borrowed from nature itself. Swarm intelligence, a phenomenon observed in ant colonies, bee swarms, and bird flocks, is now driving innovation in autonomous vehicles, promising safer, more efficient, and collaborative transportation systems. This cutting-edge approach moves beyond individual vehicle autonomy to create interconnected networks of vehicles that communicate, coordinate, and optimize collectively, much like the coordinated behavior of social insects.
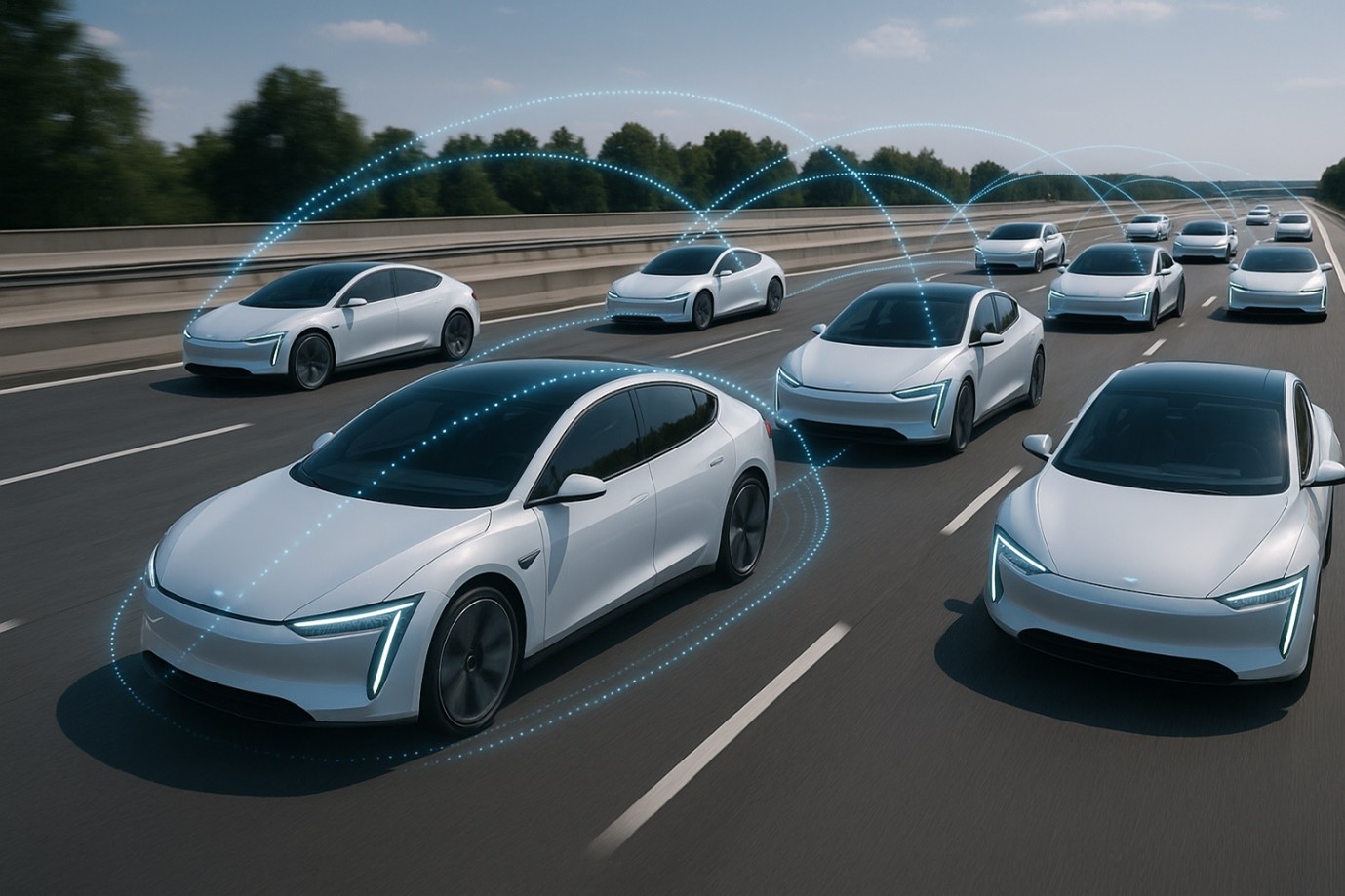
Autonomous vehicles demonstrating swarm intelligence coordination in highway platooning formation
Understanding Swarm Intelligence
Swarm intelligence is when many simple, independent agents (like ants, birds, or small software programs) follow basic rules and interact with each other locally, and together they create smart, complex behavior as a group. Unlike traditional centralized control systems, swarm intelligence empowers individual vehicles to make localized decisions while contributing to the overall system’s efficiency and safety. This approach is inspired by natural phenomena where no single leader directs the group, yet remarkable coordination emerges through simple local interactions.
How Swarm Intelligence Works in Autonomous Vehicles
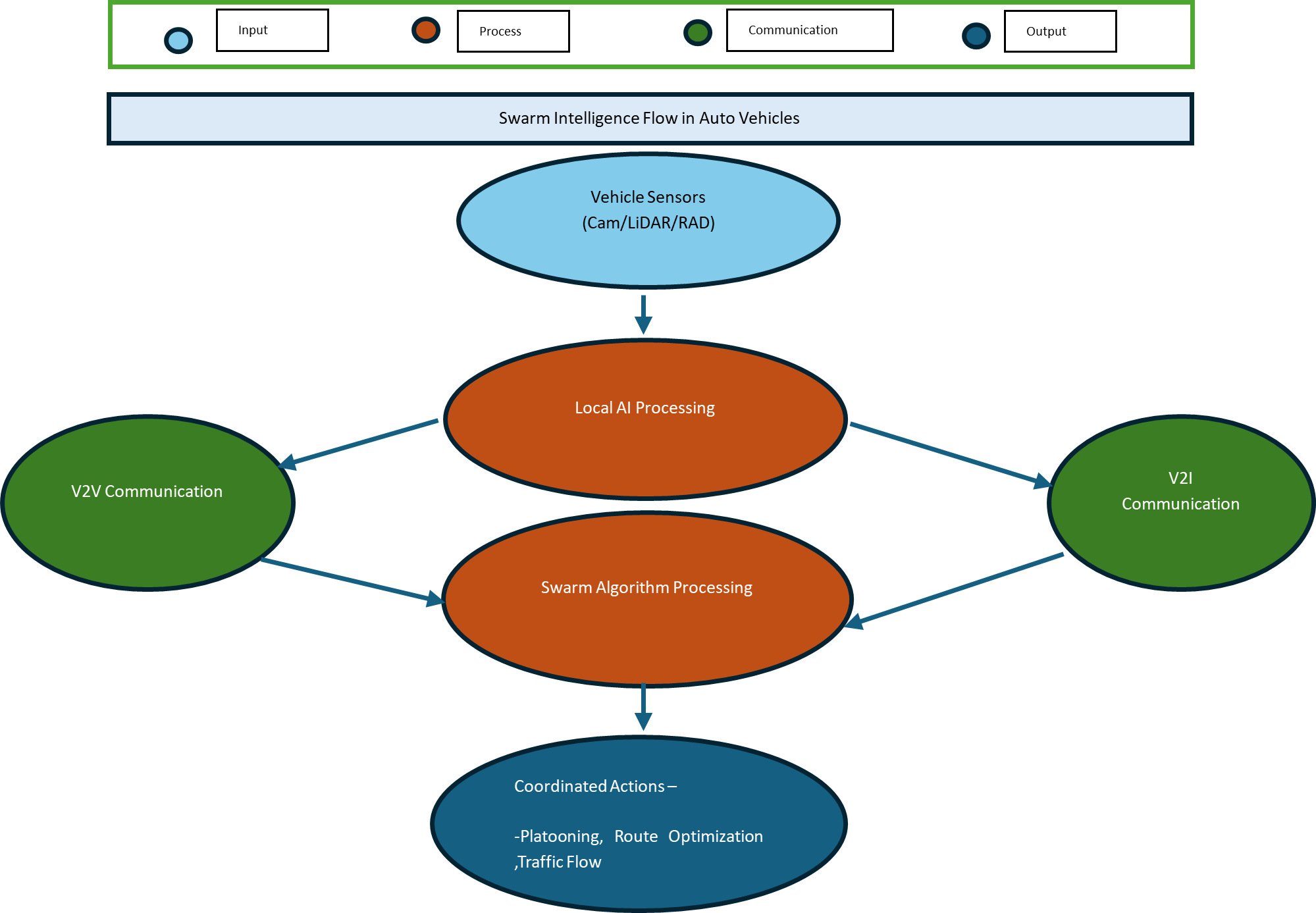
In the context of autonomous vehicles, swarm intelligence enables cars to function as a cohesive network rather than isolated units. Each vehicle acts as an intelligent agent that can communicate with nearby vehicles and infrastructure, sharing critical information about speed, position, road conditions, and potential hazards in real-time.
Swarm Intelligence Applications in Autonomous Vehicles
- Vehicle Platooning and Cooperative Driving: One of the most promising applications is vehicle platooning, where groups of vehicles travel in tightly coordinated formations. Recent research demonstrates that vehicles can cooperate in both longitudinal and lateral dimensions, with studies showing a 12.04% improvement in running mobility when vehicles swarm like bee colonies to overtake slow-moving vehicles safely. This cooperative approach enables vehicles to maintain much shorter following distances than human drivers could safely manage, significantly increasing highway capacity while reducing fuel consumption through aerodynamic drafting effects. (Read More)
- Dynamic Traffic Flow Optimization: Swarm intelligence transforms traffic management from static, pre-programmed systems to adaptive, responsive networks. Vehicles can dynamically adjust their routes, speeds, and lane positions based on real-time collective intelligence, leading to significant reductions in congestion and improved overall traffic efficiency. Advanced implementations incorporate Vehicle-to-Vehicle (V2V) and Vehicle-to-Infrastructure (V2I) communication protocols, enabling vehicles to share information about traffic conditions, accidents, or road hazards miles ahead of their physical sensors’ detection range. (Read More)
Core Algorithms Powering Swarm Intelligence
- Genetic Algorithms in Autonomous Vehicles: Genetic algorithms (GA) serve as powerful optimization tools for autonomous vehicle systems. GAs work by simulating natural selection, creating a population of candidate solutions (e.g., different neural network behaviors), evaluating their performance, and then breeding the best ones to generate new, improved solutions over generations. This evolutionary approach allows AVs to adapt to dynamic environments and solve complex problems that are difficult for traditional methods.
These evolutionary algorithms excel at:
- Optimizing neural network architectures for behavioral cloning
- Improving vehicle control systems through automated parameter tuning
- Enhancing path planning algorithms for complex driving scenarios
Real-world implementations show genetic algorithms successfully optimizing vehicle routing problems, with applications in automotive parts companies demonstrating practical deployment capabilities.
Ant Colony Optimization for Path Planning: Ant Colony Optimization (ACO) algorithms revolutionize route planning for autonomous vehicles by mimicking the pheromone-based pathfinding behavior of ant colonies. Recent studies demonstrate that improved ACO algorithms reduce iteration while enhancing vehicle traveling ability in dense obstacle environments. Advanced ACO implementations integrate with Q-Learning to create adaptive systems capable of:
- Real-time path optimization in dynamic environments
- Collision-free navigation through complex urban landscapes
- Efficient handling of unexpected obstacles and traffic changes
Research shows ACO algorithms particularly excel in multi-depot vehicle routing problems, offering substantial improvements over traditional optimization methods.
Particle Swarm Optimization for Motion Planning: Particle Swarm Optimization (PSO) represents a breakthrough in autonomous vehicle motion planning. A notable implementation has driven over 3,500 km safely and entirely autonomously in suburban traffic, demonstrating the real-world viability of PSO-based systems. (Read More)
PSO algorithms offer several advantages:
- Modular design adaptable to different vehicle types and environments
- Parallel processing capabilities enabling fast planning cycles
- Robust performance in dynamic, real-world conditions
Recent developments in Modified PSO (MPSO), when combined with show 2.5% performance improvements over traditional PSO algorithms in longitudinal vehicle control applications. (Read More)
State-of-the-Art (SOTA) Algorithms
While classic algorithms are still widely used, researchers are continually developing new algorithms inspired by a wider range of natural phenomena. Some of the more recent and notable SOTA algorithms include:
- Grey Wolf Optimizer (GWO): This algorithm copies how grey wolves organize themselves and work together while hunting. The pack’s social hierarchy is modeled with four levels: alpha (α), beta (β), delta (δ), and omega (ω). The hunt is guided by the three best solutions (α,β,δ), with the rest of the wolves (ω) updating their positions based on the leaders’ movements. GWO has gained popularity for its strong convergence and ability to balance exploration and exploitation. (Read More)
- Moth-Flame Optimization (MFO): Inspired by the navigation mechanism of moths, which use a transverse orientation to fly at a fixed angle to a light source. The algorithm simulates moths moving toward “flames,” which are essentially the best solutions found so far. The position updates are a spiral movement, which allows the moths to explore the area around the flames, gradually converging on the best ones. (Read More)
- Whale Optimization Algorithm (WOA): Based on the “bubble-net” hunting strategy of humpback whales. The algorithm models the whales’ behavior of encircling prey and then moving in a spiral to attack it. WOA’s unique approach to exploration and exploitation has shown strong performance on various optimization problems. (Read More)
Real-World Applications and Case Studies
Bosch and Volkswagen Partnership
The most significant real-world implementation comes from the collaboration between Bosch and Volkswagen, which launched in 2021. This partnership harvests swarm intelligence for automated driving through their “road signature” technology, where fleets of Volkswagen Golf 8s across Europe continuously collect and share real-time road information. (Read More)
The system works by:
- Using vehicle sensors to detect landmarks, road signs, and lane markings
- Transmitting anonymized data to cloud-based processing systems
- Creating highly accurate digital twins of road environments
- Enabling vehicles to localize themselves within decimeter-level accuracy
Traffic Management Systems
Advanced traffic management implementations using swarm intelligence show remarkable results. Studies demonstrate 50% increases in traffic flow rates and 70% reductions in vehicle pass delays when AI-powered swarm systems manage traffic light optimization. (Read More)
Latest Research and Ongoing Developments
Cutting-Edge Research Findings
Recent 2023-2025 research reveals several breakthrough developments:
- Decentralized, bio-inspired coordination at scale: Researchers are building swarm controllers that let large numbers (dozens → hundreds) of ground or aerial vehicles coordinate in real time using local rules inspired by animals (flocking, schooling) rather than a central controller — improving robustness and scalability. A high-visibility demo used animal-movement data to drive a 100-drone autonomous swarm with onboard collision avoidance. (Read More)
- V2X + edge orchestration for cooperative multi-agent driving: End-to-end AV stacks are being tested with vehicle-to-vehicle and vehicle-to-infrastructure (V2X) links to enable cooperative perception and planning (e.g., cooperative path planning, joint maneuver coordination and platooning). Recent workshops/challenges at top conferences stressed V2X as the next step toward cooperative AV swarms. (Read More)
- Human-in-the-loop and swarm supervision research: Work funded by DARPA and others shows a single human operator can manage surprisingly large heterogenous swarms with the right interfaces and autonomy—an active area: improving human–swarm interaction and operator tools. (Read More)
Conclusion
Swarm intelligence represents a paradigm shift in autonomous vehicle technology, moving from isolated individual systems to collaborative, interconnected networks that mirror nature’s most efficient coordination mechanisms. With proven real-world implementations showing significant improvements in safety, efficiency, and traffic flow, and a rapidly expanding market projected to grow at over 40% annually, swarm intelligence is positioned to become a cornerstone technology for tomorrow’s transportation systems.
As research continues to address current challenges in cybersecurity, scalability, and regulatory compliance, the integration of genetic algorithms, ant colony optimization, and particle swarm optimization will likely accelerate, bringing us closer to truly intelligent, cooperative transportation networks that benefit from the collective wisdom of the swarm.
The journey from individual autonomous vehicles to coordinated swarm systems represents not just a technological evolution, but a fundamental reimagining of how we approach transportation challenges one inspired by billions of years of natural selection and collective intelligence.